

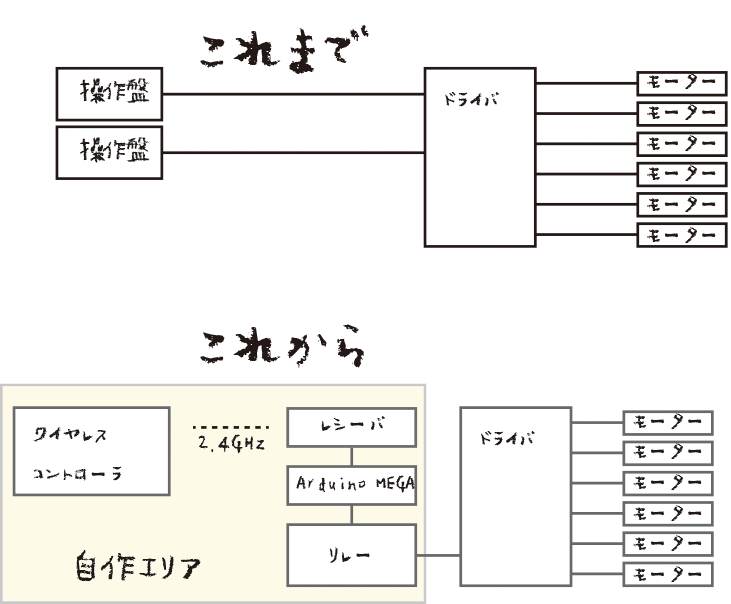
店のスタジオにあるストロボの位置合わせをワイヤレス化する記事です。
これまで有線で固定されていた操作盤をArduinoとVS-C3(PS2互換)に置き換えます。


この操作盤はボタンの位置関係が非常につかみづらく、左のボタンを押すと左移動。右を押すと右移動。ここまではいいんだけど、左下をおすと上移動。右下は下移動。ドラクエ3のダンジョンでコントローラーの上下左右がシフトする床があったんだけど、あれを仕事中にやらされる感じでとてもやりづらいのでした。
さらに配線の長さの都合上、操作中の自分の立ち位置を自由に決められず非常に使い勝手が良くありません。
ワイヤレス化によって直感的にどこのポジションからでも動かせるようにします。
これまで物理スイッチでOn/Offしていたところをマイコンからのリレーに置き換えます。 また、操作盤は2個あったのでこれらを1つのコントローラーだけですべて操作できるようにします。
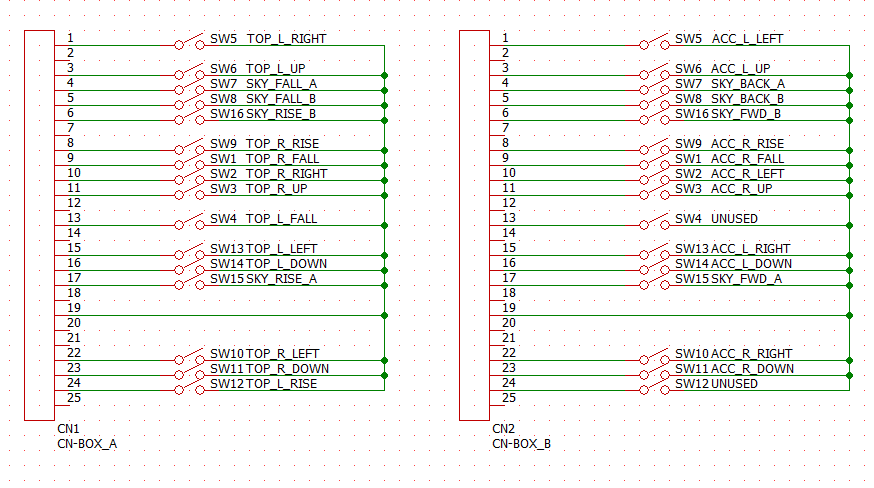
既存の操作盤の中身
作りは非常にシンプルで、ボタンの数だけモメンタリのプッシュスイッチが埋め込まれているだけでした。各配線は32vにプルアップされています。
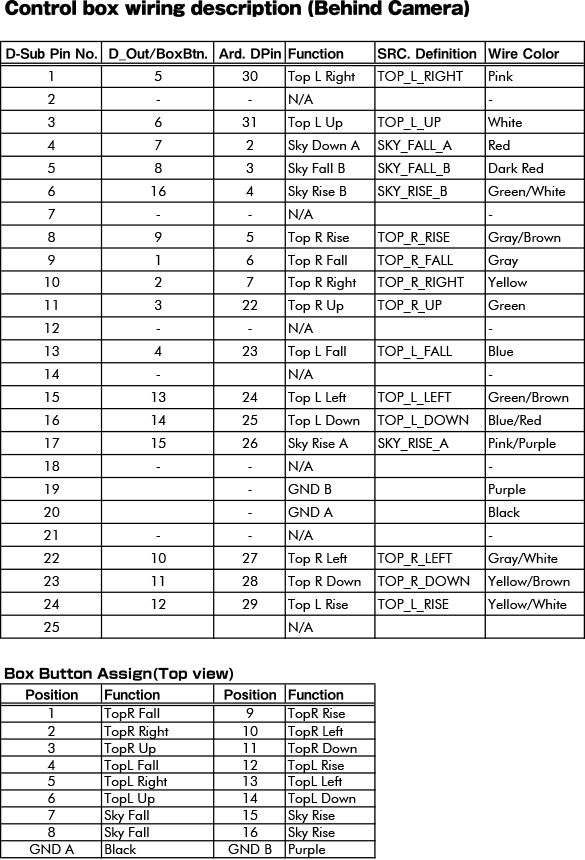
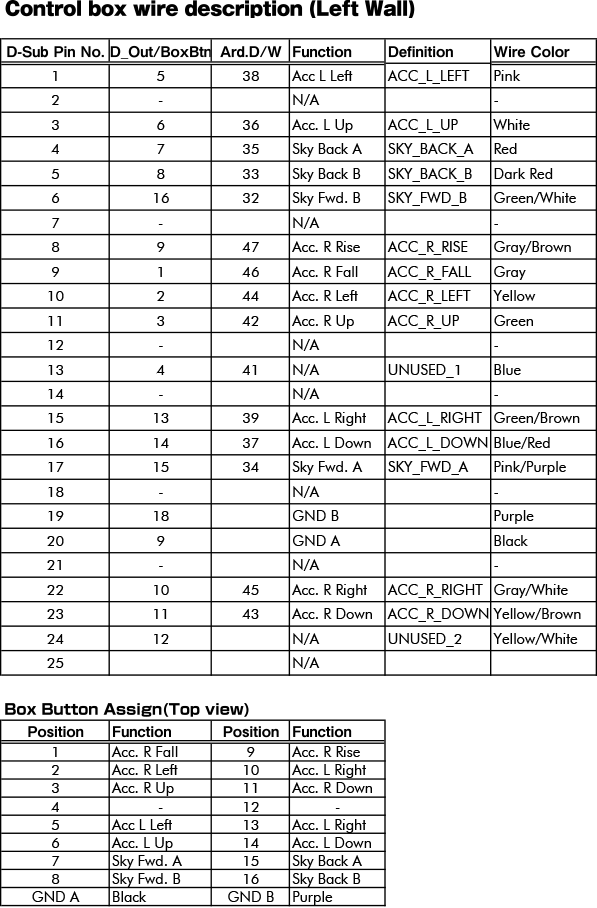
この操作盤のケーブルが天井を這ってストロボラックの上に積み上げられたモータードライバ的な装置につなげられています。
配線をテスターで確認して表にまとめました。
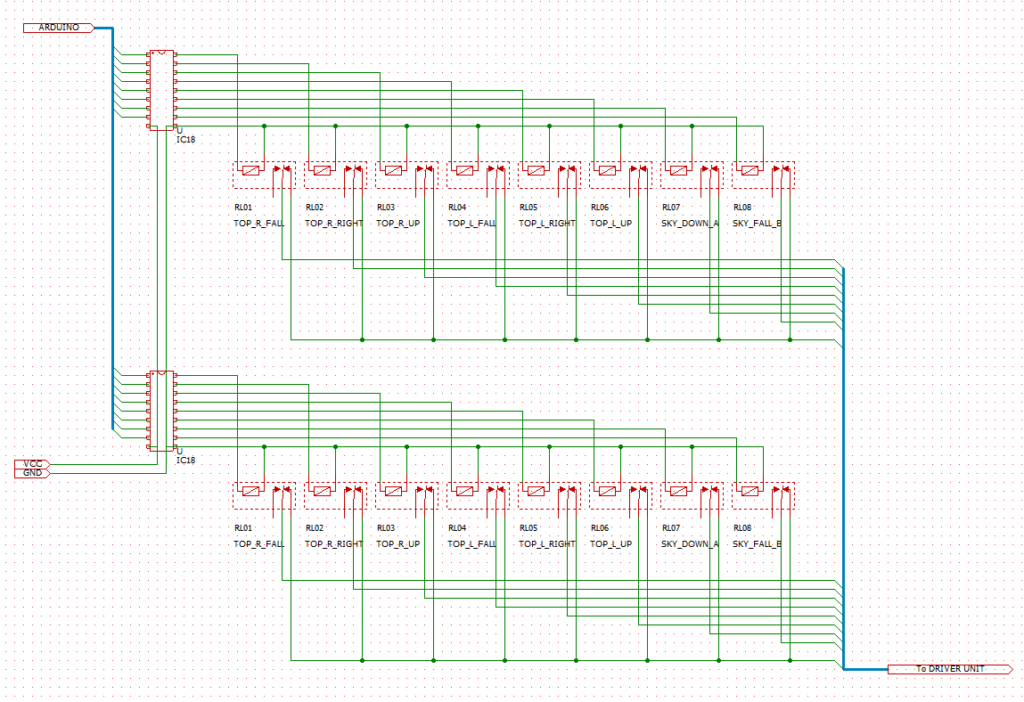
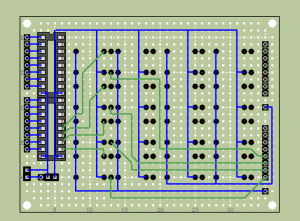
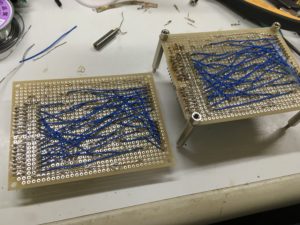
リレー基盤
Arduinoからの信号をトランジスタアレイを通してリレーに繋ぎます。リレーは秋月からドサッと32個買いました。TD62083は中に逆起電力を受け流すフリーホイールダイオードが内蔵してあるので大変に作るのが楽です。部品点数が減るのでありがたい。
本当はSSRのスマートなアレイがあれば最高ですが、負荷が直流なので今回は物理リレーを使用しています。
プリント基板を作るのは面倒なのでユニバーサル基盤で作っています。自作エフェクタでは良くPress-n-Peelを使っていましたが、歩留まりが悪いので最近は使っていません。

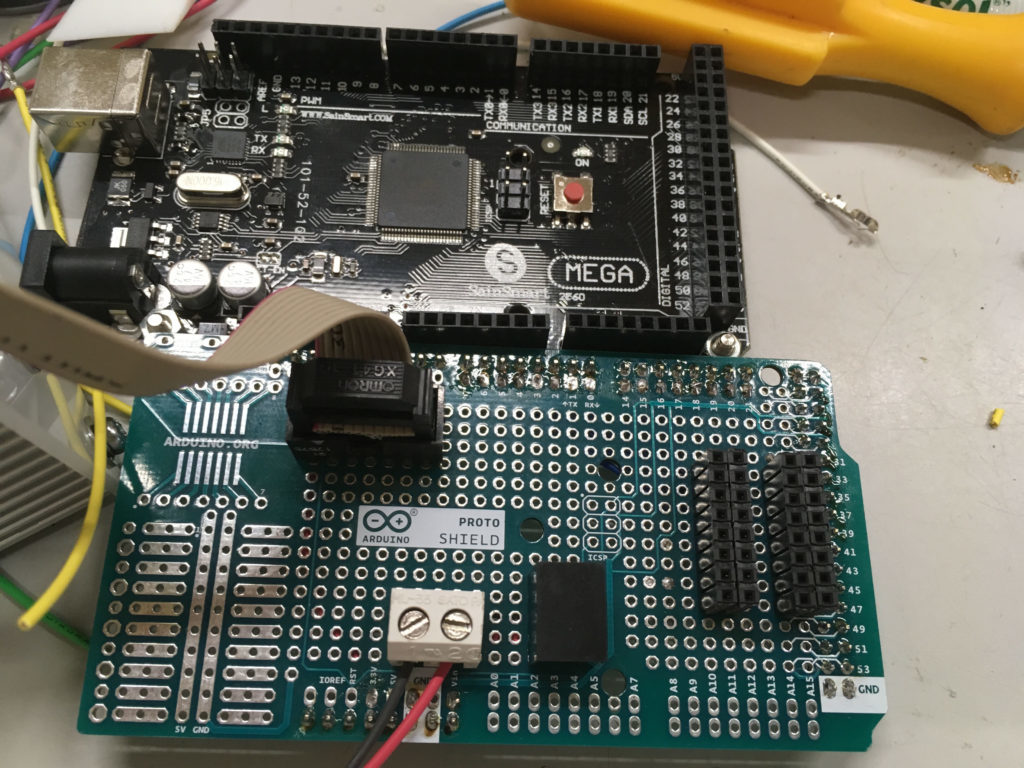
Arduino MEGA
動かしたいリレーの数が32個と多く、I/Oが14個のArduinoでは足りないので、I/Oピンが54本のArduino MEGA(のクローン)と純正シールドを使っています。
コントローラー
VS-C3 ロボット専用無線コントローラ を使ってみました。ネット上でログが多く、 PS2純正を使うよりも 楽に仕上がりそうだったのでこれにしました。
ハードウェアはここまでになります。次回ソフトウェア編をどうぞ
